
P06 控制律
P06 控制律
Target
- 建立水平运动模型
- 研究其可控性
假设
横向控制与纵向控制解耦
- 通过方向控制进行轨迹跟踪。
- 车辆的速度通过横向控制在可接受的约束(最大速度)内“承受”。
使用自行车运动学模型:
- 低速情况下,偏航动力学和侧滑忽略不计。
- Ackermann假设。
- 参考点是后轴的中心。
- 后轴的两轮和前轴的两轮被替换为每个车轴中心的一个虚拟轮。
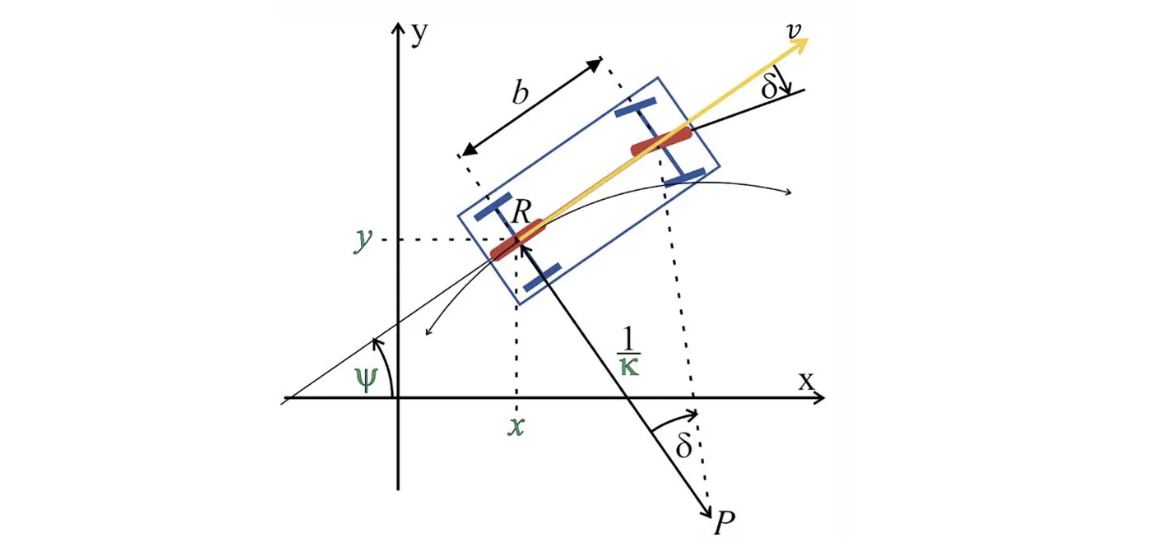
- $x$ : 后轴中心点 R 的横坐标
- $y$ : 后轴中心点 R 的纵坐标
- $\Psi$:车辆相对于 x 轴的方向
- $b$:轴距
- $a$ :一轴的两轮之间的距离(车道宽度,未表示)
- $v$ :车辆速度
- $\delta$:车轮的转向角
- $\kappa$ : 车辆轨迹的曲率
- $P$ : 瞬时转动中心
- 输入:
- $v$ 和 $\delta$
- 输出:
- $x, y, \Psi$ 和 $\kappa$
建模
动力学模型
- $(x) :v_x=v * \cos (\Psi)$
- $(y) : v_y=v * \sin (\Psi)$
- 角速度 $\dot{\Psi}=\frac{v}{R}$
- 曲率半径:$R=\frac{1}{\kappa}=\frac{b}{\tan (\delta)}$
- 曲率的微分:$\dot{\kappa}=\frac{d}{d t}\left[\frac{\tan (\delta)}{b}\right]=\frac{\dot{\delta}}{b * \cos ^2(\delta)}=\sigma$
设状态向量vecteur d’état$X=[x, y, \Psi, \kappa]$,建立动力学模型:
即:
线性化
线性化假设
由于模型非线性,需要在平衡点$X_0=\left[x_0, y_0, \Psi_0\right] / \dot{x}_0=0, \dot{y}_0=0, \dot{\Psi}_0=0, \kappa_0=0$附近进行线性化。
为此,增加假设:
- 车辆速度为常数,等于 $v_{\max }$ (带符号,取决于车辆行驶方向)。
- 平行泊车:车辆方向 $\Psi$ 的变化较小,因此可以将其平均值固定在平衡状态 $\bar{\Psi}=20^{\circ}$ 。
- 在实际停车过程中,给定参考轨迹仅为 $\left[x{r e f}, y{r e f}, \Psi_{r e f}\right]$ ,简化为状态 $[x, y, \Psi]$ 。
记$\widetilde{U}=\tan (\delta)$,则有:
线性化
计算雅可比矩阵:
得线性化之后的系统:
可控性 commandabilité
计算可控性矩阵:
其行列式为0,因此不可控。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Raphael's Home!





