
C5 稳定性和鲁棒性分析 Analyse des performances et de robustesse d’une loi de commande
C5 稳定性和鲁棒性分析 Analyse des performances et de robustesse d’une loi de commande
C5.1 通过传递函数表示 Représentation par fonction de transfert
C5.1.1 从内部表示到外部表示
对于内部表示为:
的系统,其外部表示:
其中,$H(s)$的极点包含在$A$的特征值中;基变换不糊改变$H(s)$,$H(s)$不依赖$S$的不可观和不可控部分。
C5.1.2 内部表示和外部表示的联系
适当性 Propre
当$\lim {|s| \rightarrow \infty} F(s)$有限,则称$F(s) \in \mathcal{M}{p, m}(\mathbb{R}(s))$是适当的;如果$\lim {|s| \rightarrow \infty} F(s)=0$,则称$F(s) \in \mathcal{M}{p, m}(\mathbb{R}(s))$是严格适当的。
传递函数实现的存在性
如果$H(s)$是一个状态表示的传递函数实现,则$H(s)$是适当的。当状态表示中,$D = 0$时,$H(s)$是严格适当的。
最小实现
如果状态表示$(A,B,C,D)$的维度最小,将其称为$H(s)$的最小实现。
当且仅当$(A,B)$可控,$(A,C)$可观测时,状态表示$(A,B,C,D
)$是最小实现。
C5.1.3 单输入单输出SISO线性系统的频率相应
对于输入$u(t)=U_0 e^{j \omega t}$,输出$y(t)=Y_0 e^{j \omega t}$,有:
增益取决于脉冲频率$\omega$
可以通过伯德图,布莱克尼古拉图或者奈奎斯特图获得频率响应。
CE5.1 简单的多输入多输出例子
对于传递函数$H(s)=\left[\begin{array}{cc}H_1(s) & 0 \0 & H_2(s)\end{array}\right] \text {, où }\left|H_1(j \Omega)\right|=5,\left|H_2(j \Omega)\right|=1$,有以下情况:
C5.1.4 传递函数的奇异值分解 Décomposition en valeurs singulières
奇异值分解
对于给定矩阵$\mathbf{M} \in \mathbb{C}^{p \times m}$,可以分解为:
其中,$\mathbf{U} \in \mathbb{C}^{p \times p} ,\mathbf{V} \in \mathbb{C}^{m \times m}$是酉矩阵,即满足$\mathbf{U}^ \mathbf{U}=I_p ,\mathbf{V}^ \mathbf{V}=I_m$。
$\Sigma \in \mathbb{R}^{p \times m}$是一对角矩阵,其对角线元素即为奇异值$\sigma_i$。
奇异值的性质
- 奇异值是$\mathbf{M M}^$或者$\mathbf{M}^{M}$的特征值的平方根。有$\sigma1 \geq \sigma_2 \geq \cdots \geq \sigma{\min (p, m)} \geq 0$。
- 奇异值不是唯一的。
- 如果$U$和$V$可逆,则奇异值矩阵的秩与原矩阵相等。
在matlab中,可以使用svd 计算奇异值。
奇异值与增益
奇异值决定了其所在方向上增益。
$\bar{\sigma}(A) , \underline{\sigma}(A)$代表了最大的增益和最小的增益。
关键性质
- $\bar{\sigma}(M)=\max _{\substack{x \in \mathbb{C}^m \ x \neq 0}} \frac{|M x|_2}{|x|_2}$
- $\underline{\sigma}(M)=\min _{\substack{x \in \mathbb{C}^m \ x \neq 0}} \frac{|M x|_2}{|x|_2}$
- $\bar{\sigma}(M)=0 \Leftrightarrow M=0$
- $\forall \lambda \in \mathbb{C}, \sigma_i(\lambda M)=|\lambda| \sigma_i(M)$
- $\bar{\sigma}(M+N) \leq \bar{\sigma}(M)+\bar{\sigma}(N)$
- $\bar{\sigma}(M N) \leq \bar{\sigma}(M) \bar{\sigma}(N)$
- $\text { Pour } c \in \mathbb{C}, \bar{\sigma}(c)=\underline{\sigma}(c)=|c|$
- $\text { Pour } r \in \mathbb{R}, \bar{\sigma}(r)=\underline{\sigma}(r)=|r|$
CE5.2
遂由最大增益为$2$,最小增益为$1$。
C5.1.5 低增益与高增益
当$\underline{\sigma}(H(j \omega)) \gg 1$称为高增益,当$\bar{\sigma}(H(j \omega)) \ll 1$称为低增益
C5.1.6 $H_{\infin}$范数
适用于任何稳定的,输入为$U e^{j \omega t}$,输出为$H(j \omega) U e^{j \omega t}$的系统。对于多输入多输出系统:
对于单输入单输出系统:
$H_{\infin}$范数表示系统在所有频率下的最大增益,通常用于分析系统的鲁棒性。
对于串联系统:
对于并联系统:
对于加法系统:
C5.2 伺服系统表示
C5.2.1 经典的伺服系统
一个经典的私服系统可以被表示为:
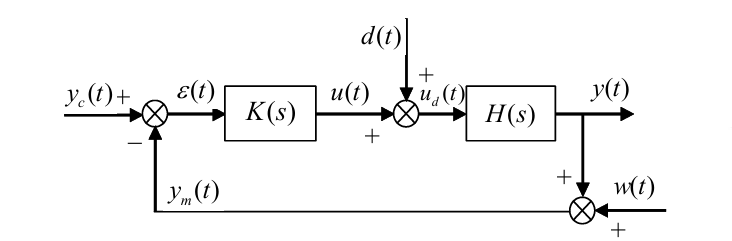
其中,$K(s)$是校正,$H(s)$是私服系统。
良好定义

如果由$H(s),K(s)$组成的环中,每次变量之间的传递函数都是正确定义且适当的,则称系统为良好定义的。
如,若$H(s)=\frac{s+1}{s+2}$,$K(s)=-\frac{s+2}{s+1}$,则$e_1$和$y_1$中间的传递函数:
并非正确定义的。
再如,若$K(s)=-1$,则$e_1$和$y_1$中间的传递函数:
分子极点数量大于分母,是不适当的。
C5.2.2 不同传递函数之间的转换
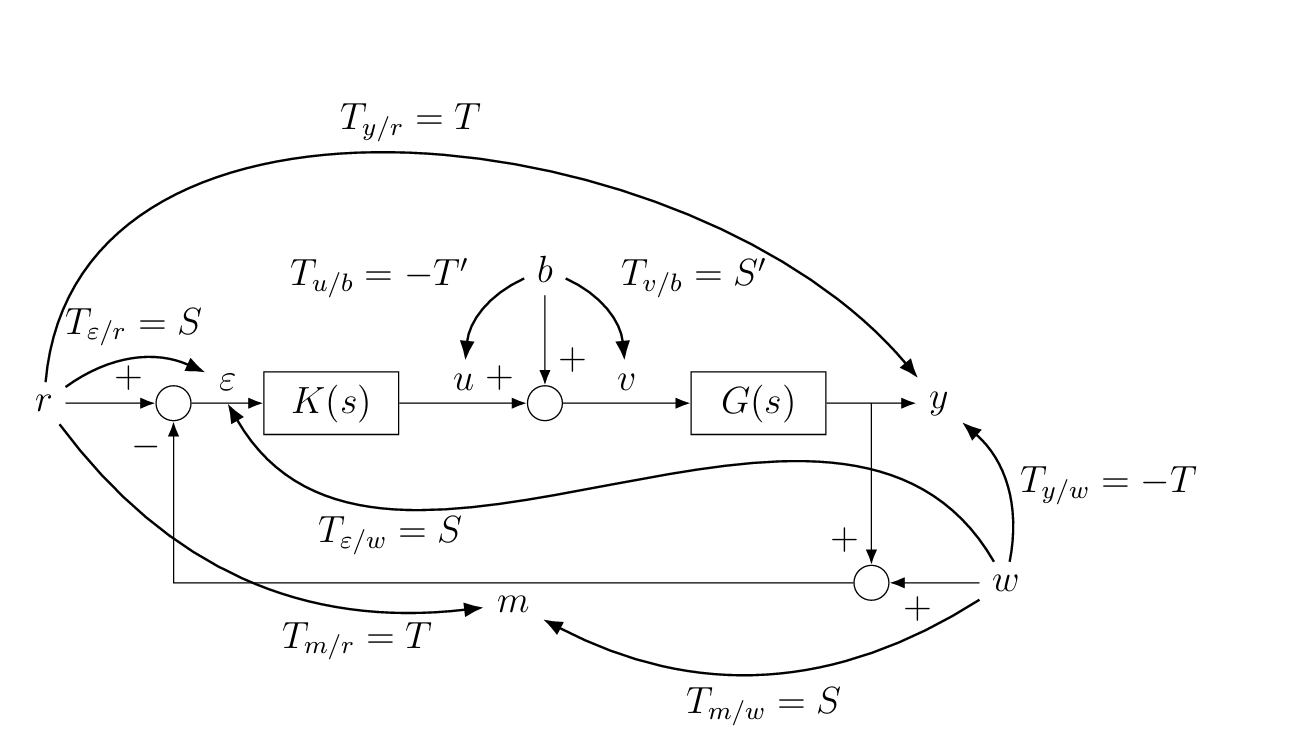
如上图,定义:
- 开环传递函数:
- $T_{B O}(s)=G(s) K(s)$ :开环传递函数(在系统的输入端,或控制器的输出端)。
- $T_{B O}^{\prime}(s)=K(s) G(s)$: 开环传递函数(在系统的输出端,或控制器的输入端)。
- 灵敏度函数:
- $S(s)=\left(I+T_{B O}(s)\right)^{-1}$ :控制器输入端的灵敏度函数(或系统输出端的灵敏度函数)。
- $S^{\prime}(s)=\left(I+T_{B O}^{\prime}(s)\right)^{-1}$ :系统输入端的灵敏度函数(或控制器输出端的灵敏度函数)。
- $T(s)=T{B O}(s)\left(I+T{B O}(s)\right)^{-1}$: 控制器输入端的互补灵敏度函数(或系统输出端的互补灵敏度函数)。
- $T^{\prime}(s)=T{B O}^{\prime}(s)\left(I+T{B O}^{\prime}(s)\right)^{-1}$ :系统输入端的互补灵敏度函数(或控制器堬出端的互补灵敏度函数)。
由此,误差被表示为:
更进一步的:
单输入单输出情况
- $T{BO} = T{BO}’$
C5.2.3 LQ控制的情况
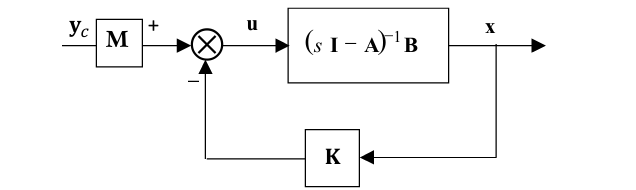
- 系统:$\dot{x}(t)=A x(t)+B u(t),y(t) = x(t)$
- 控制:$u(t) = -Kx(t)+My_c(t)$
- 开环传递函数:$T_{BO}(s)= K(sI-A)^{-1}B$
C5.2.4 LQG控制的情况
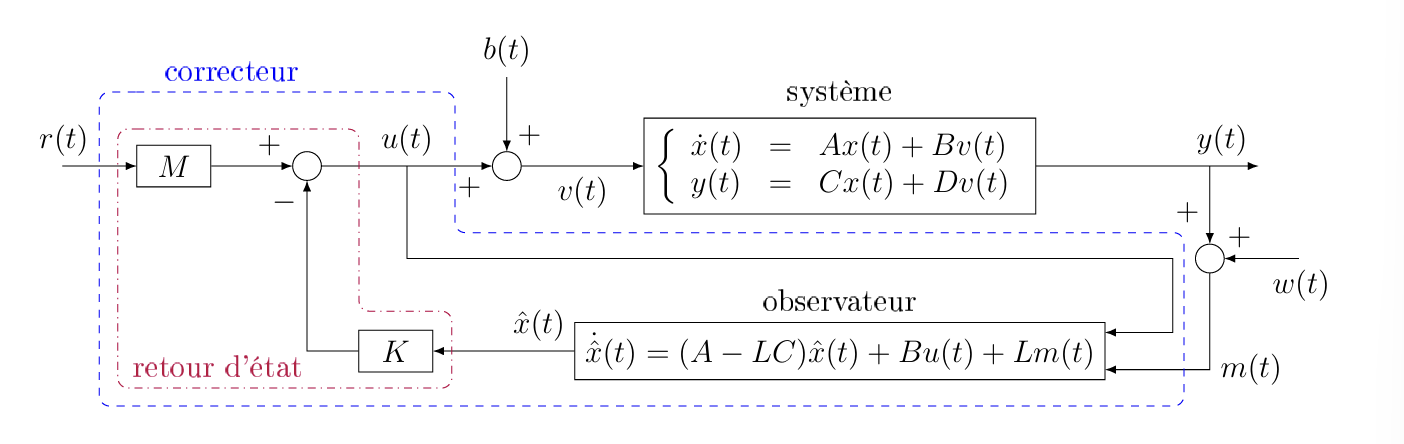
C5.3 伺服系统的稳定性: 单输入单输出的情况
C5.3.1 闭环系统的稳定性
闭环稳定性条件:如果所有传递函数的极点的实部都严格为负,那么系统是闭环稳定的。等价地,满足$1 + T_{B0}(s) = 0$的所有s 的实部都必须严格为负。
- 直接计算闭环极点:
- 特点:直接获得系统是否稳定的“是/否”回答,但提供的信息有限。
- Routh判据(参见建模课程):
- 特点:仅适用于有理函数,能够研究稳定性对一个或两个参数的影响。
- Nyquist判据(基于开环系统分析):
- 特点:使用图形化方法,允许定义稳定裕度。
一个系统在闭环下是EBSB稳定的,当且仅当开环的Nyquist轨迹(即$T_{B0}(s)$对Nyquist轮廓的图像)满足以下条件:
- 不经过临界点 $(−1,0)$。
- 绕点 $(−1,0)$ 逆时针方向转动的圈数等于开环传递函数中具有严格正实部的极点数量。
若开环系统是稳定的,则闭环系统在EBSB(扩展的增益和相位稳定性)的条件下稳定。当Nyquist轨迹按增大的频率$\omega$ 绘制时,临界点$(−1,0)$于左侧。
C5.3.2 裕度
稳定性裕度:Nyquist轨迹越远离临界点,系统的闭环稳定性越强,越远离不稳定区。
模值裕度:$\Delta M=\min \omega\left|T{B O}+1\right|=\min \omega \frac{1}{|S(j \omega)|}=\frac{1}{\max \omega|S(j \omega)|}$,一般在0.5到0.7
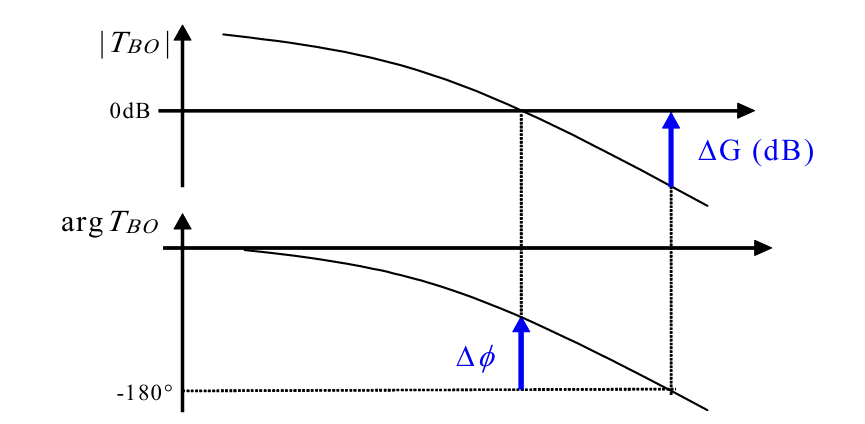
增益裕度:$\Delta G=\frac{1}{\left|T{B O}\right|} \quad \text { pour } \quad \arg \left(T{B O}\right)=-180^{\circ}$,一般在3到5(10到15dB)
相位裕度:$\Delta \varphi=\arg \left(T{B O}\right)-\left(-180^{\circ}\right) \text { pour }\left|T{B O}\right|=1$,一般在45°到60°
延迟裕度:$\Delta \tau=\frac{\Delta \varphi(\mathrm{rad})}{\omegac(\mathrm{rad} / \mathrm{s})}$,其中截止频率$\omega_c$满足$\left|T{B 0}\left(j \omega_c\right)\right|=1$
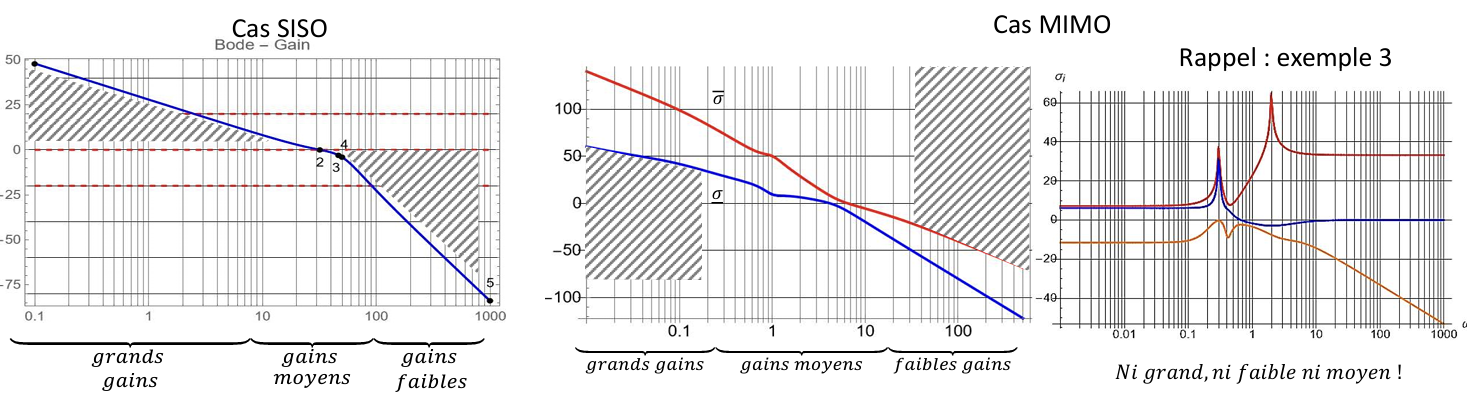
C5.3.3 开环增益选择
大增益(用于低频范围:精度、去敏感化和扰动抑制)
策略:当 $\omega \ll \omegac$ 时,实施大增益策略,即 $\left|T{B 0}(j \omega)\right| \gg 1$
- 更加精确
- 去敏感化
- 对干扰的抑制
小增益(用于高频范围:低通滤波和鲁棒性)
策略:当 $\omega \gg \omegac$ 时,实施大增益策略,即 $\left|T{B 0}(j \omega)\right| \ll 1$
- 抑制快速变化:低通滤波
高频鲁棒性:控制器的小增益增强了模型不确定性的鲁棒性
C5.4 伺服系统稳定:多输入多输出的情况
C5.4.1 增益分析
| 需求说明 | 理想的期望行为 | 以开环增益表示 |
|---|---|---|
| 1) 误差为零 | $T_{y/y_c}(s) = T(s) = H(s)K(s)(I + H(s)K(s))^{-1} \approx I$ |
$T{\epsilon/y_c}(s) = S(s) = (I + H(s)K(s))^{-1} \approx 0$ | $H(s)K(s)$ 远大于 $I$ |
| 2) 输出对测量误差不敏感 | $T{y/w}(s) = -T(s) = -H(s)K(s)(I + H(s)K(s))^{-1} \approx 0$ | $H(s)K(s)$ 远小于 $I$ |
| 3) 控制补偿扰动 $d(t)$ | $T{u_d/d}(s) = S’(s) = (I + H(s)K(s))^{-1} \approx 0$ | $H(s)K(s)$ 远大于 $I$ |
| 4) 为限制能量消耗,控制不补偿指令噪声 | $T{u/d}(s) = -T’(s) = K(s)H(s)(I + K(s)H(s))^{-1} \approx 0$ | $H(s)K(s)$ 远小于 $I$ |
| 开环增益条件 | 闭环特性 | 需求说明中的要求 |
|---|---|---|
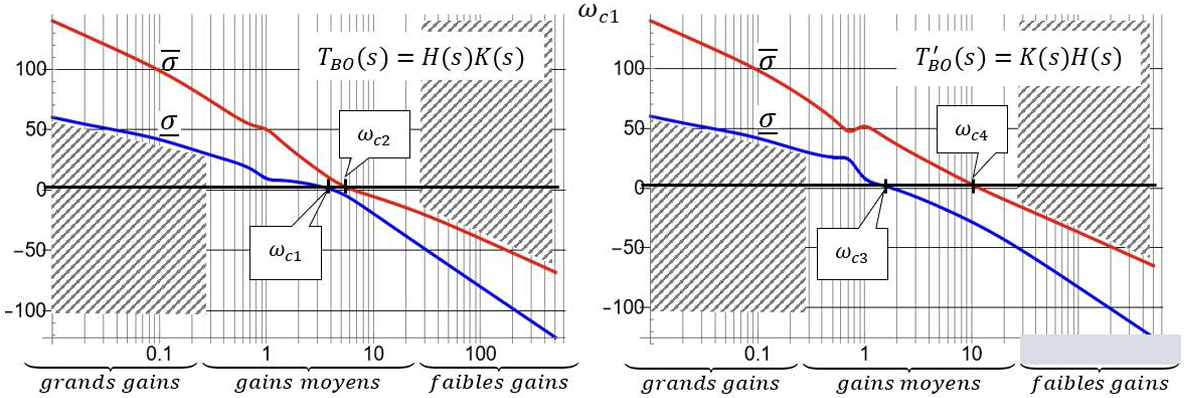
| $\omega \ll \omega{c 1}, \sigma\left(T{B O}(j \omega)\right) \gg 1$ | $T{\epsilon / y_c}(j \omega)=S(j \omega) \approx 0$$T{y / y_c}(j \omega)=T(j \omega) \approx I$ | 响应质量:对于足够慢的参考变化,输出跟随设定值 |
| $\omega \ll \omega{\mathrm{cl}}, \sigma\left(T{B O}(j \omega)\right) \gg 1$ | 在存在模型变化$\tilde{H}(s)$的情况下:$\tilde{T}{y / y_c}(j \omega) \approx I \approx T{y / y_c}(j \omega)$ | 去敏感化:输出在高增益频率区对模型变化不敏感 |
| $\omega \ll \omega{c B}$和$\sigma\left(T{B O}^{\prime}(K(j \omega))\right) \gg 1$ | $T_{\epsilon / d}(j \omega)=-H(j \omega) S^{\prime}(j \omega) \approx K(j \omega)^{-1} \approx 0$ | 低频段抑制控制干扰 |
| $\omega \gg \omega{\mathrm{c} 2}, \sigma\left(T{B O}(j \omega)\right) \ll 1$ | $T_{y / w}(j \omega)=-T(j \omega) \approx 0$ | 高频段滤除干扰 |
| $\omega \gg \omega{C 4}, \sigma\left(T{B O}^{\prime}(j \omega)\right) \ll 1$ | $T_{u / d}(j \omega)=-T^{\prime}(j \omega) \approx 0$ | 高频段滤除干扰 |
| $\omega \gg \omega{c 2}, \sigma\left(T{B O}(j \omega)\right) \ll 1$和$\sigma(K(j \omega)) \ll 1$ | $T{u / w}(j \omega)=-T{u / y_c}(j \omega)= -K(j \omega) S(j \omega) \approx 0$ | 限制指令变化的快速变化 |
| $\omega \gg \omega{c 2}, \sigma\left(T{B O}(j \omega)\right) \ll 1$和$\bar{\sigma}(K(j \omega)) \ll 1$ | $I+T{B O}(j \omega)$和$I+T{B O}^{\prime}(j \omega)$在高频段模型变化下保持可逆 | 在高频下的模型变化下的鲁棒性 |
C5.4.2 鲁棒性裕度
| 标准名称和符号 | 扰动类型 | 裕度定义 | ||
|---|---|---|---|---|
| 增益裕度$\overline{\Delta G}$ | 增益变化:$a_i = 1 + \delta a_i \in \mathbb{R}$(或$b_i = 1 + \delta b_i \in \mathbb{R}$) | $\overline{\Delta G} = \sup { m \mid \forall i \, | a_i | \le m \Rightarrow \widetilde{\text{STB}} }$,其中$a_i \in \mathbb{R}$ |
| 相位裕度$\overline{\Delta \varphi}$ | 相位变化(在恒定增益下):$a_i = e^{j \theta_i}$(或$b_i = e^{j \theta_i}$,复数位于单位圆上) | $\overline{\Delta \varphi} = \sup { m \mid \forall i \, | \theta_i | \le m \Rightarrow \widetilde{\text{STB}} }$ |
| 延迟裕度$\overline{\Delta R}$ | 信息传递中的延迟:$a_i = e^{-\tau_i s}$(或$b_i = e^{-\tau_i s}$) | $\overline{\Delta R} = \sup { r \mid \forall i \, 0 \le \tau_i \le r \Rightarrow \widetilde{\text{STB}} }$ | ||
| 模裕度$\overline{\Delta M}$ | 同时变化的增益和相位:$a_i = (1 + \delta a_i)^{-1} \in \mathbb{C}$(或$b_i = (1 + \delta b_i)^{-1} \in \mathbb{C}$) | $\overline{\Delta M} = \sup { m \mid \forall i \, | a_i | \le m \Rightarrow \widetilde{\text{STB}} }$,其中$a_i \in \mathbb{C}$ |
C5.4.3 小增益定理
小增益定理 — LTI(线性时不变)系统
- 假设:$G_1, G_2$ 是稳定的 LTI 系统,且 $G_1 * G_2$ 是良好定义的。
- 定理: 如果 $| G1 |\infty | G2 |\infty < 1$,则 $G_1 * G_2$ 是良好定义且稳定的。
- 结论:非放大系统的稳定连接仍然是稳定的。
小增益定理 — LTI — 必要且充分条件版本
- 假设:$G_1, G_2$ 是稳定的 LTI 系统。
- 定理:$G1 * G_2$ 是良好定义且稳定的,当且仅当存在 $\gamma$ 满足 $| G_2 |\infty < \gamma$ 并且 $| G1 |\infty \le \gamma^{-1}$。
- 提醒:$| G |\infty = \sup{\omega \in \mathbb{R}} \overline{\sigma}(G(j\omega))$
小增益定理的应用 — LTI — 必要且充分条件版本
- 使用该定理:
- 设 $G_1 = \Delta$:对标称模型的容许不确定性。
- 设 $G_2 = M(s)$:系统的闭环传递函数(标称模型)。
- 考虑的情况:
- 输出鲁棒性指标:通过研究 $S$ 和 $T$。
- 输入鲁棒性指标:通过研究 $S’$ 和 $T’$。
C5.4.4 MIMO系统的鲁棒性度量
对于多输入多输出(MIMO)系统的鲁棒性分析,采用以下参数化:
- $P_2 = I + \Delta$,其中 $\Delta = \operatorname{diag}(b_1 - 1, \dots, b_m - 1)$
- $\gamma = |T(s)|_\infty$
保证的裕度:
- 增益裕度:系统对于所有 $|\delta bi| < |T(s)|\infty^{-1}$ 都是稳定的。
- $\Delta G \geq |T(s)|_\infty^{-1}$
- 相位裕度:系统对于所有 $|\thetai| < 2 \arcsin \left( \frac{1}{2|T(s)|\infty} \right)$ 都是稳定的。
- $\Delta \varphi \geq 2 \arcsin \left( \frac{1}{2|T(s)|_\infty} \right)$
- 模裕度:系统对于所有 $|\delta bi| < \frac{1}{1 + |T(s)|\infty}$ 都是稳定的。
- $\Delta M \geq \frac{1}{1 + |T(s)|_\infty}$
注意:这些是保证的裕度,可以进一步优化。
对于 $P_2 = (I - \Delta)^{-1}$ 的情况,其中 $\Delta = \operatorname{diag}(b_1^{-1} - 1, \dots, b_m^{-1} - 1)$,采用以下参数:
- $\gamma = |S(s)|_\infty$
保证的裕度:
- 增益裕度:系统对于所有 $|\delta bi| < \frac{1}{|S(s)|\infty + 1}$ 都是稳定的。
- $\Delta G \geq \frac{1}{|S(s)|_\infty + 1}$
- 相位裕度:系统对于所有 $|\thetai| < 2 \arcsin \left( \frac{1}{2|S(s)|\infty} \right)$ 都是稳定的。
- $\Delta \varphi \geq 2 \arcsin \left( \frac{1}{2|S(s)|_\infty} \right)$
- 模裕度:系统对于所有 $|\delta bi| < |S(s)|\infty^{-1}$ 都是稳定的。
- $\Delta M \geq |S(s)|_\infty^{-1}$
C5.4.5 线性二次型(LQ)控制律的鲁棒性
对于系统:
$\dot{x}(t) = A x(t) + B u(t)$
控制律为:
$u(t) = -K x(t) + y_c(t)$
开环传递函数:
$T_{BO}(s) = K (sI - A)^{-1} B$
稳定性裕度:
- 对于增益裕度,LQ控制保证了增益为无穷大(稳定性在增益变化1/2时也能保证)。
- 对于相位裕度,保证相位裕度大于等于60°。
C5.4.6 LQG/LTR控制(环路传递恢复)
目的:通过LQG控制恢复LQ控制的裕度。
- 使用Kalman滤波器的权重矩阵:$\begin{cases}
V = V^T = V_0 + \alpha^2 B B^T \succeq 0 \
W = W^T \succ 0
\end{cases}$ - 假设:
- 系统$(A, B)$是可稳定的,且$(C, A)$是可检测的。
- 输出维度$\dim(y) \geq \dim(u)$
- $G(s)$在$\operatorname{Re} \geq 0$处没有零点
- 结果:当 $\alpha \to \infty$ 时,传递函数 $T_{BO}’(s) = K(s)G(s)$ 收敛至 $K(sI - A)^{-1}B$,从而恢复稳定性裕度。







